Performance Analysis of Gyroscope and Accelerometer Sensors for Seismocardiography-Based Wearable Pre-Ejection Period Estimation
Executive Summary
This study evaluates the performance of gyroscope and accelerometer sensors for estimating the pre-ejection period (PEP) using seismocardiography (SCG). By leveraging time-domain features and ensemble regression techniques such as XGBoost, the authors demonstrate that combining features from both sensors reduces the root mean squared error (RMSE) by 30% compared to prior methods. The findings suggest that gyroscopes provide superior PEP estimation compared to accelerometers, and sensor fusion can enhance wearable cardiac monitoring systems.
Answer Machine Insights
Q: Which sensor provided the best single-axis PEP estimation?
The gyroscope's x-axis provided the best single-axis PEP estimation with an RMSE of 12.63±0.49 ms.
In single axis comparison of gyroscope and accelerometer, angular velocity signal around head to foot axis from the gyroscope provided the lowest RMSE of 12.63±0.49 ms across all subjects.
Q: What was the impact of combining gyroscope and accelerometer features?
Combining features from the gyroscope and accelerometer reduced the RMSE to 11.46±0.32 ms, showing significant improvement over single-axis methods.
The best estimate of PEP, with a RMSE of 11.46±0.32 ms across all subjects, was achieved by combining features from the gyroscope and accelerometer.
Key Results
The gyroscope's x-axis achieved the lowest RMSE of 12.63±0.49 ms among single-axis sensors.
Combining x and y axes of the gyroscope with x and z axes of the accelerometer reduced RMSE to 11.46±0.32 ms, a 30% improvement over prior methods.
Visual Evidence
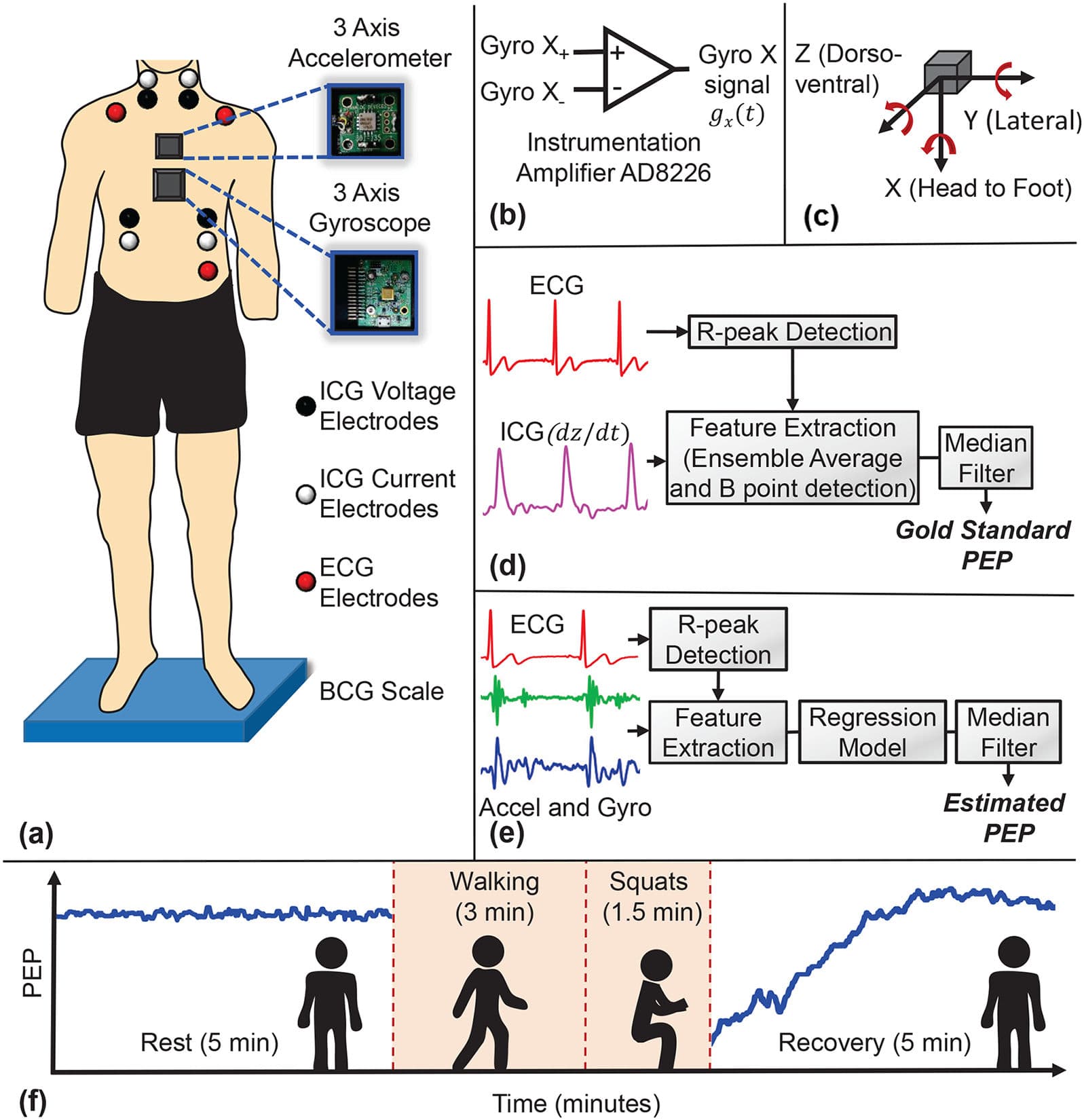
Fig. 2. (a) The experimental setup with the subject standing on the BCG scale, with all other wearable sensors attached to the body. One accelerometer (ADXL354) and one gyroscope (QGYR330HA) are placed on the mid sternum. ECG and ICG signals are collected simultaneously. (b) Circuit connection for the conversion of differential output of the gyroscope to single output per axis, using an instrumentational amplifier (AD8226). (c) Axis labels used for the accelerometer and gyroscope, with accelerometer X axis in the head to foot direction, Y axis in the side to side (lateral) direction and Z axis in the dorso-ventral direction. Gyroscope X axis angular velocity corresponds to the rotation around head to foot axis, Y axis angular velocity corresponds to the rotation around frontal axis and Z axis angular velocity corresponds to the rotation around sagittal axis. (d) Block diagram of the segmentation for ICG signal with reference R peaks from the corresponding ECG signal, feature extraction from the ICG segments to calculate ground truth PEP. (e) Block diagram of the segmentation for accelerometer and gyroscope signals with reference R peaks from corresponding ECG signal, feature extraction from the segments to estimate PEP. (f) PEP trend with the chronology of the experiment, 5-minute rest standing on BCG scale, 3-minute
Clinical Snapshot
Evidence Rating
Relevance
high Priority